



Категория
- Загрузочный рычаг
- Рычаг с верхней загрузкой
- Нижний загрузочный рычаг
- Складная лестница
- Компоненты автоцистерны
- Крышка люка
- Аварийный педальный клапан
- API адаптера
- Аксессуары для автоцистерн
- Насос для сжиженного нефтяного газа
- Насос и расходомер
- Топливный насос
- Загрузка деталей рычага
- Клапан улавливания паров
- Насос и дозатор сжиженного нефтяного газа
- Компоненты колонки для сжиженного нефтяного газа
Рекомендуемые продукты







4086 Настольный робот-манипулятор 20x20 см Мини-робот Загрузка и выгрузка мелких деталей с помощью промышленного робота-манипулятора 3c
Размер упаковки на единицу продукта 106,00 см * 50,00 см * 103,00 см Вес брутто на единицу продукта 50 000 кг Промышленн
Базовая информация
| Модель №. | ЗКБОТ-4086 |
| Обслуживание клиентов | 1 год |
| Гарантия | 1 год |
| Режим управления | Двухточечное управление |
| Режим вождения | Электрический |
| Приложение | Сварка, погрузка, ковка |
| Состояние | Ной |
| Сертификация | CE |
| полезная нагрузка | 3 кг |
| Повторите точность положения | 0,1 мм |
| Максимальная дальность | 700 мм |
| Рабочее напряжение | 220 В переменного тока/110 В переменного тока |
| энергопотребление | 100 Вт |
| Водить машину | Серводвигатель Hybird + высокоточный винтовой редуктор Re |
| ЭТО В | 10 входов, 8 выходов (один для ошибок шкафа управления). |
| Транспортный пакет | Картонная коробка |
| Спецификация | 180*180мм 0,2куб.м. |
| товарный знак | МЫЛО |
| Источник | Китай |
| HS-код | 8479501900 |
| Производственная мощность | 1000 ШТ./лет |
Упаковка и доставка
Размер упаковки на единицу товара: 106,00 см * 50,00 см * 103,00 см. Общий вес единицы продукции: 50 000 кг.Описание продукта
Промышленная механическая рукаИнтеллектуальная система визуальной сортировки AI АРТ. ЗКБОТ-4086
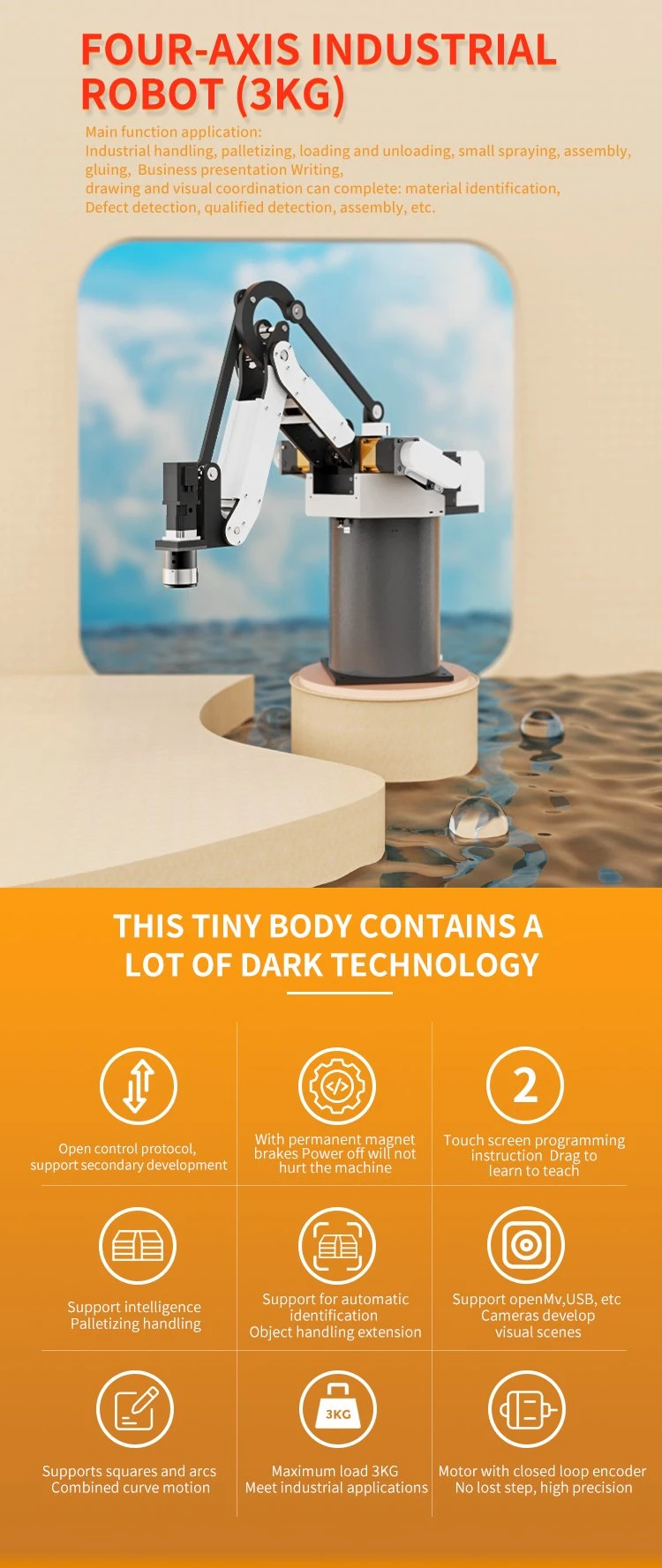
Наша промышленная механическая рука. Основное применение: промышленная погрузка, паллетирование, погрузка и разгрузка, сборка, склеивание, бизнес-презентация. Написание, рисование и визуальная координация могут выполнять: идентификацию материала, обнаружение дефектов, квалифицированное обнаружение, сборку и т. д.

В1: Можете ли вы настроить цикл работы? A1: Сенсорный экран может поддерживать цикл движения узла в пределах 50 шагов, а ПК может поддерживать неограниченный цикл шагов. В2: Есть ли функция автоматического сохранения очков обучения при выключении устройства? А2: Да.
В3: Может ли робот иметь открытый исходный код? A3: Не полностью открытый исходный код, нижний уровень обеспечивает протокол связи для управления манипулятором, поддерживает вторичную разработку периферийных устройств и дополнительных функций, а также взаимодействует с внешними устройствами в режиме онлайн.
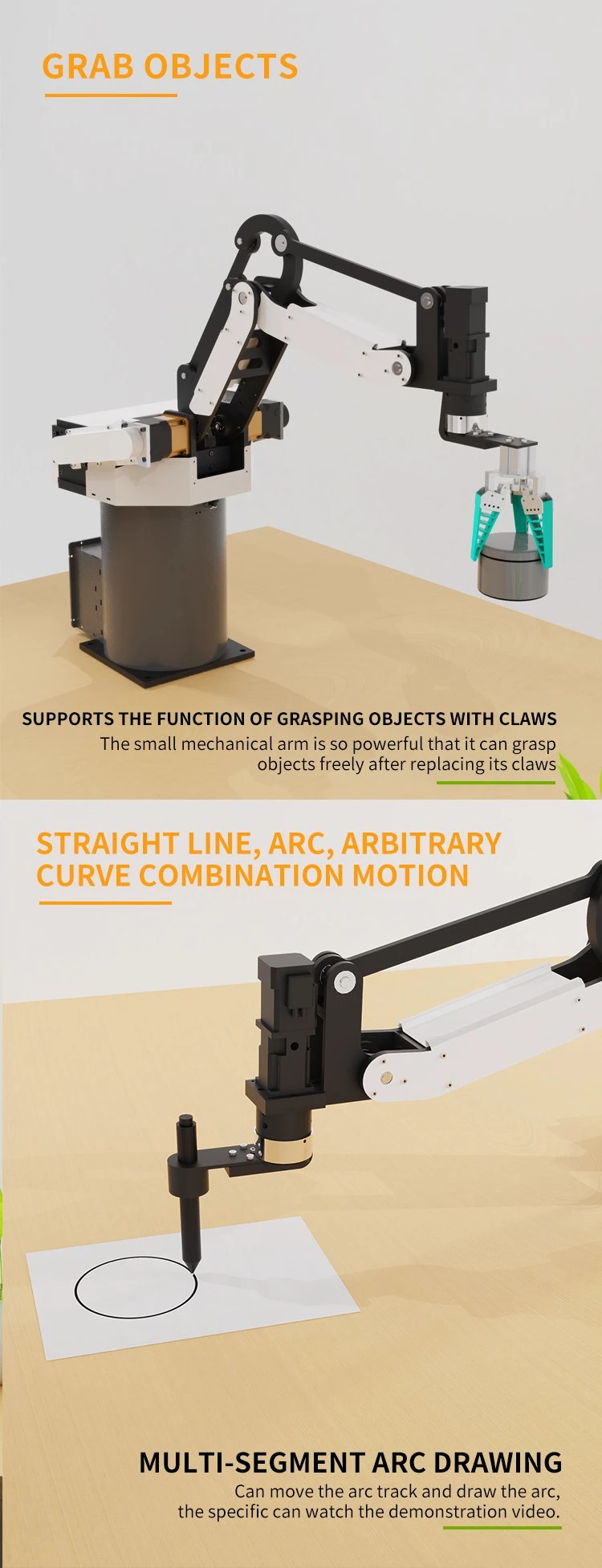
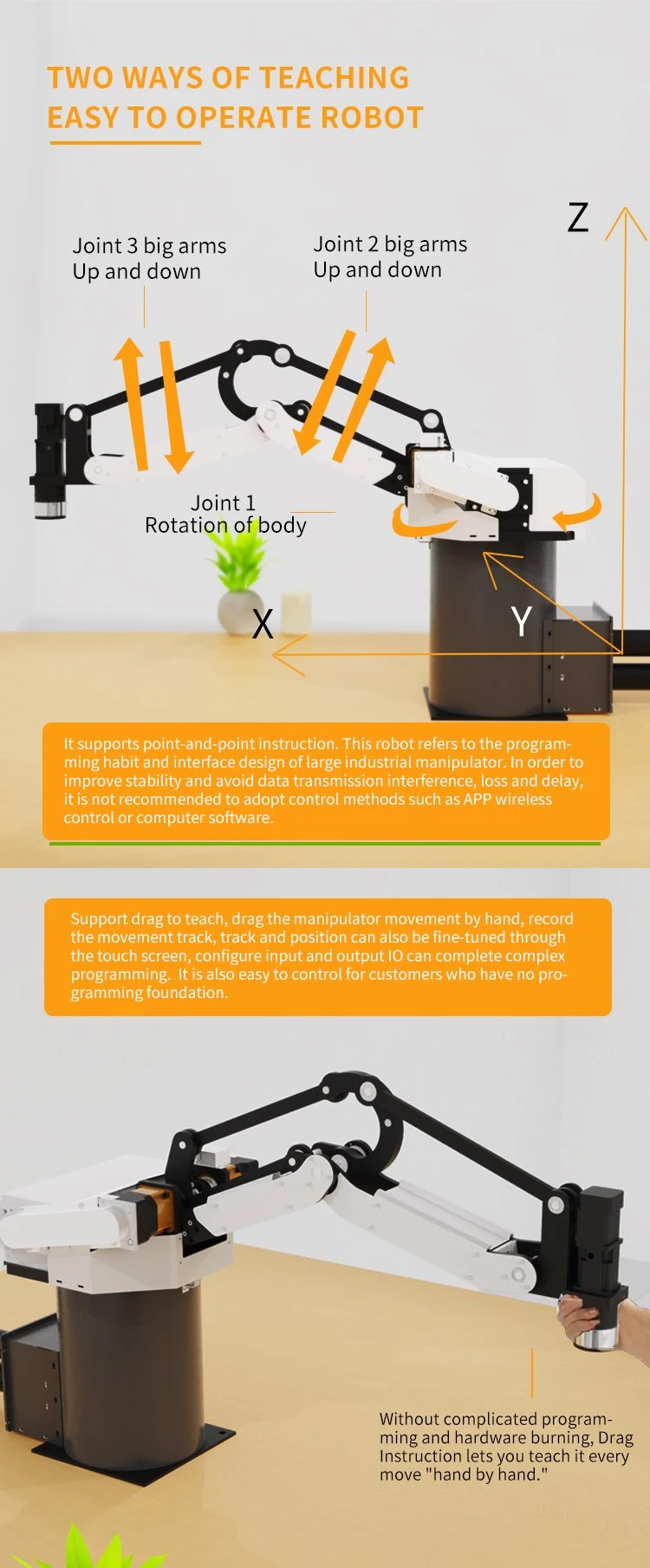
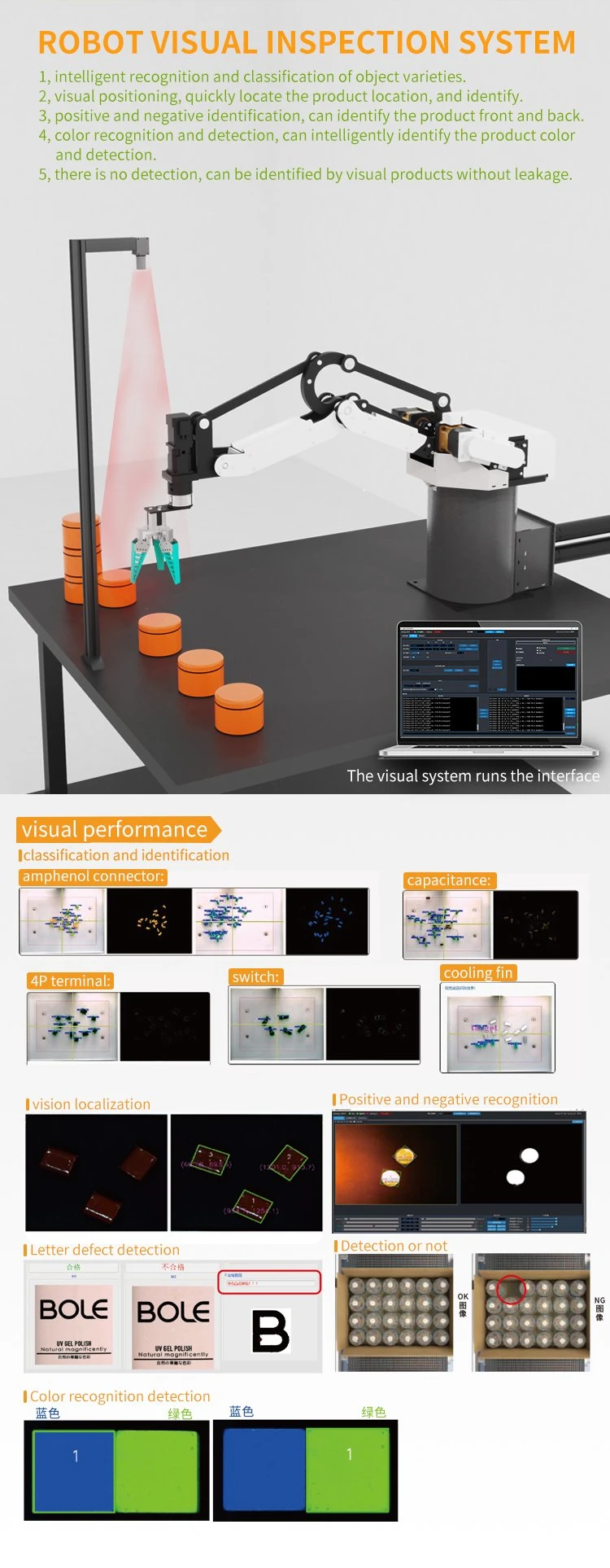
Открытый протокол управления, поддержка вторичной разработки. С тормозами на постоянных магнитах. Выключение не повредит машину. Руководство по программированию сенсорного экрана. Рисуйте, чтобы учиться, учить. Поддерживает интеллект. Паллетирование обработки. Поддержка автоматической идентификации. Расширение обработки объектов. Поддержка камер openMv, USB и т. д. Разработка визуальных сцен. Поддерживает квадраты и дуги. Комбинированное кривое движение. Максимальная нагрузка 3 кг. Соответствует промышленному применению, открытый пол, открытое управление движением, последовательный порт, протокол связи, вторичная разработка пользовательского оборудования манипулятора робота проста в эксплуатации и может использоваться при промышленной погрузочно-разгрузочных работах, укладке на поддоны, погрузке и разгрузке, небольших операциях распыления, может быть точка-точка - точка, опорная линия точка-точка, линия-линия, дуга, выход DO, вход DI, включая мировые координаты, так что прямо вверх и вниз. Протокол управления также может поддерживать openMv, USB и другие камеры для разработки визуальных сцен и визуального взаимодействия, определения размера объекта и положения объекта и его транспортировки (необходимо разработать собственный верхний компьютер), а также внешние устройства онлайн, могут быть использованы для небольших промышленных производств. Этот робот-манипулятор также оснащен инструкцией по эксплуатации, которая проста и быстра в использовании. Устройство инструкций поддерживает инструкции вручную и инструкции извлечения. Поддерживает три пользовательские формулировки и три независимые программы, в каждой программе 50 программируемых точек, максимальная нагрузка на манипулятор до 3 кг. Функции обработки: поддерживает воздушный насос весом 3 кг для всасывания предметов. Маленькая рука робота настолько мощная, что может легко удерживать предметы весом до 3 кг. Захват предметов: поддерживает функцию захвата предметов когтями. Маленькая механическая рука настолько мощная, что может свободно захватывать предметы после замены когтей. Прямая линия, дуга, любая комбинация кривых: рисование многосегментной дуги. Можно перемещать дугу и рисовать дугу, человек может посмотреть демонстрационное видео. Два способа обучения. Простой в использовании робот: шарнирно-сочлененный, с тремя большими руками вверх и вниз. Соедините 2 большие руки вверх и вниз. Сустав 1 поворот корпуса. Поддерживает инструкции «точка-точка». Этот робот основан на навыках программирования и дизайне интерфейса крупных промышленных манипуляторов. Чтобы повысить стабильность и избежать помех, потерь и задержек при передаче данных, не рекомендуется использовать такие методы управления, как управление беспроводными приложениями или компьютерное программное обеспечение. Поддержка перетаскивания для обучения, перетаскивание вручную движения манипулятора, запись трассировки движения, отслеживание и положение также могут быть точно настроены с помощью сенсорного экрана, настройка ввода и вывода ввода-вывода может завершить сложное программирование. Легко управлять даже клиентам без знаний программирования. Без сложного программирования и прожига оборудования вы можете научить его каждому движению «рука за рукой» с помощью Drag Instruction. Роботизированная система визуального контроля: 1. Интеллектуальное обнаружение и классификация типов объектов. 2, визуальное позиционирование, быстрая локализация и идентификация местоположения продукта. 3, положительная и отрицательная идентификация, позволяет идентифицировать переднюю и заднюю часть продукта. 4, распознавание и распознавание цвета, может разумно идентифицировать цвет и распознавание продукта. 5, нет обнаружения, можно идентифицировать визуальные продукты без утечки. Визуальные характеристики: классификация и идентификация. Амфеноловый разъем: Емкость: 4-контактный разъем: переключатель: охлаждающее ребро: визуальная локализация, положительное и отрицательное обнаружение, обнаружение буквенных ошибок, обнаружение или нет, обнаружение цвета. Укладка груза для организации: 1, поддержка укладки на поддоны Товары по 3 кг. 2. Корпус из алюминиевого сплава + движущиеся части высокопрочного процесса, обеспечивающие круглосуточную непрерывную промышленную эксплуатацию. 3, двигатель энкодера с замкнутым контуром, высокая точность паллетирования. Поддержка управления вводом-выводом и онлайн-работа нескольких машин на производственной линии: вход и выход IO 6, поддержка внешнего сигнала ввода-вывода IO, управление триггером робота или выходные сигналы ввода-вывода робота запускают управление внешними устройствами. Восемь инструкций по эксплуатации и точные координаты, настройки скорости и т. д. Поле выбора набора команд, которое при активации становится желтым. Команда точки предназначена для пересечения точки, дуга предназначена для рисования дуги, а прямая линия и смещение прямой линии предназначены для пересечения прямой линии (первая - абсолютно противоположная позиция, вторая - относительная позиция). . DI/DO — это вход и выход ввода-вывода (по 6 интерфейсов каждый). Координатное положение и состояние скорости каждого шага отображаются в режиме реального времени. Храните максимум 50 обучающих очков. Поддерживаются три формулировки. Всего могут поддерживаться 3 рабочие формулы. Каждая формула поддерживает 50 шагов. В состоянии команды Интерфейс настройки параметров: Переключение системы координат, Мировые координаты (трехосное соединение) Координаты сустава (одноосное действие) Координаты в реальном времени Текущий угол манипулятора (координаты сустава) Текущие мировые координаты манипулятора, мм для шестерня. См. дисплей выбора передачи. Общий коэффициент скорости движения (1-100). Значение не может быть установлено равным 0. Задержка между шагами. Управление шасси. Отличное управление руками. Контроль предплечья. Всего поддерживается 3 текущие формулы, каждая из которых поддерживает 50 шагов. Выбор набора команд: точка, дуга, линия, смещение линии DI, DO. Координаты цели. Скорость одного шага. Повторяемость: ± 0,05 мм Мы используем совместные координаты и мировые координаты. Положение Точность и положение можно регулировать, прикасаясь к обучающему устройству. В соответствии с конструкцией промышленного робота функциональные инструкции манипулятора следующие: инструкция протокола калибровки нуля манипулятора робота, инструкция протокола остановки манипулятора робота, инструкция протокола шасси управления манипулятором, инструкция протокола протокола двигателя рычага управления манипулятором. Инструкция протокола двигателя рычага управления манипулятора, инструкция протокола переключателя воздушного насоса, инструкция протокола переключателя ручного захвата. Получить текущие мировые координаты (манипулятор). Протокольные инструкции. Получить текущий угол (манипулятор). Протокольное заявление. Получить текущие шаги ввода (манипулятор). Положение о протоколе. Инструкции по протоколу Arc. Управляйте инструкциями протокола DIDO. Инструкции по протоколу рукоятки управления Протокольные инструкции Управляющий воздушный насос Протокольная инструкция Механическое управление Протокол связи последовательного порта Параметры: Максимальный диапазон выдвижения составляет 910,80 мм. Вид сбоку рабочей области. Размеры отверстий окончательной сборки. Вид рабочей области сверху. Детали упаковки : Стандартное питание робота. 1 корпус робота, 1 блок управления, 1 сенсорное обучающее устройство, специальная линия подключения блока управления онтологией, подключенная к линии сенсорного экрана. Визуальный модуль (опция): Визуальный модуль (заводская настройка). Использование: обнаружение классификации, визуальное позиционирование, обнаружение положительных и отрицательных значений, обнаружение цвета, обнаружение ли, обнаружение ошибок в буквах. Параметры визуальной системы: Элемент изображения: 500 Вт. Точность идентификации: ± 0,1 мм. Диапазон выравнивания: ± 1 мм Диапазон идентификации: Может быть скорректирован в соответствии с потребностями. Применение: Используется для разделения, перемещения и паллетирования обычных предметов. Не подходит для обнаружения мелких объектов неправильной формы и высокой точности позиционирования. Камера временно поддерживает использование нашего протокола роботизированной руки. .Скорость выполнения: (Средняя скорость обнаружения одного объекта составляет около 6 секунд, если не измерять оптимальную траекторию.). .Комплект системы визуального контроля: четырехосевой промышленный робот (3 кг) + камера + программное обеспечение визуального распознавания + промышленный персональный компьютер. .